
The challenges:
The first challenge we encounter when building a two-way constraint is the cyclic dependency. However, that's not really the main and only issue. It is possible to create connections and do calculations in such a way that we can avoid this cyclic dependency. The real challenge is that we can't really have true Bi-directional constraint (I say true for lack of a better word). When I started, my idea of a bi-directional constraint was that both nodes involved are the masters and both nodes affect each other at the same time without any switching. Based on this definition the main question is how to interpolate from one state to the other when both objects are moving each other. This leads us to another question, what should be the sequence of operations when calculating for the goal state? This is an important question and more so because the final state is the sum of transformations of both nodes.
Sequence dependency:
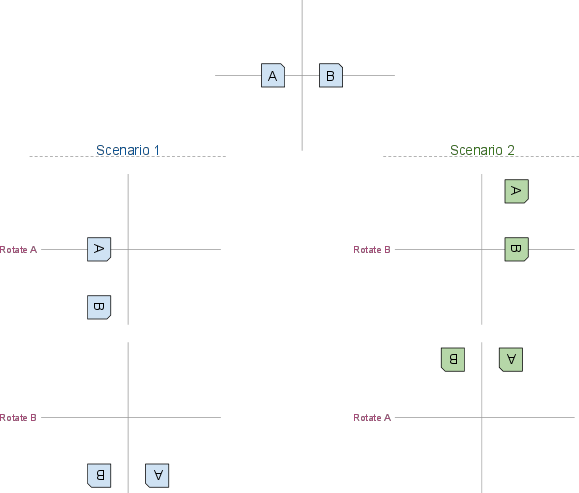
One of the most important properties of rotational transformations is that the operations are non-commutative. We already know this based on what we know about rotation orders. Let's take an example. Let's say we have two transform nodes A and B in their initial state set apart by some distance with zero rotations on both. Let's assume that both A and B affect each other (bi-directionality). Now we apply 90 degree rotation in z-axis on both nodes. Now based on the sequence of operations we get different locations in the end result as illustrated below.
Solution?
Main problem here is that we are trying to treat both nodes A and B as masters at the same time. If we consider only one node as the master at a given point of time, we can avoid the problem of sequence dependency since only one node affects the others at a given time. ExoSwitch constraint uses a concept of driver nodes and driven nodes. Using this concept, we assign one driver for the constraint system at a given point of time to drive all the other nodes. So ExoSwitch constraint does not have a problem of finding the right sequence at a single point of time.
Alternatives?
I can't think of any simple way to record a sequence in which a user is manipulating the nodes involved in a multi-way constraint. However, I think it should be possible to implement a system where all the nodes are treated as masters (or drivers) at the same time. One idea would be to have some kind of iteration based solver that calculates the interpolation to reach the goal state when all the nodes are driving one another. Maya's FBIK comes to my mind, but it seems that it takes a bit different approach. This approach is to solve the system when user moves one of the nodes(effectors) and update all the nodes with their final coordinates. When you animate these coordinates on effectors, each node is interpolated independently. Even though it works for FBIK, this behavior is not quite desirable for a multi-way constraint system. Still a long way to go for finishing a working multi-way constraint. I always get more hopeful when I solve a problem on the way. But I think I should look forward to the next problems on my path and be ready to challenge my small brain for some exercise :)

{kind=link}